LINUX教程:超詳細 ROS安裝教程
《LINUX教程:超詳細 ROS安裝教程》要點:
本文介紹了LINUX教程:超詳細 ROS安裝教程,希望對您有用。如果有疑問,可以聯系我們。
關于ROS(Robot OS 機器人操作系統),估計看這個博文的年夜兄弟之前已經都知道是啥了,我就不咋呼了...
對于ROS的安裝,在它的官方網站: http://wiki.ros.org/ROS/Installation 中也有詳細闡明.但是對于像博主這樣先天英語發育不全的人來說,直接看官網還是有點困難的.
所以博主痛定思痛,經過一番嘔心瀝血與含辛茹苦的調研后(其實便是看了幾篇相關博客),終于在博主的電腦上成功安裝了ROS,下面便是博主安裝的全過程及所遇到的坑坑包包...
1 版本選擇
ROS 雖說也叫操作系統,但它是寄生在 LINUX 操作系統之下的,所以要求年夜兄弟你的電腦里至少要先有一個 Linux 操作系統.
而對 ROS 兼容性最好的當屬 Ubuntu 操作系統了,所以大兄弟,嘿嘿嘿,你本身看著辦!
首先有一點需要說明,ROS是用來干“大事業”的,所以不保舉也不認同更不接受大家使用虛擬機.之前博主抱著玩一玩ROS的態度,在虛擬機里裝了Ubuntu, 然后裝ROS,結果,結果,結果被ROS給玩了...
1.1 Ubuntu 和 ROS 版本對應
即就是大兄弟用了Ubuntu,也是不能隨便找一個版本的ROS裝滴...
為啥呢,因為 Ubuntu 和 ROS 都是存在不同的版本滴,并且ROS各個版本之間還很接地氣的(誰說的,打死他)互不兼容,所以每一個 ROS 版本都對應著一個或兩個對應的 Ubuntu 版本.
詳細咋對應的?請看:
| ROS宣布日期 | ROS版本 | 對應Ubutnu版本 |
| 2016.3 |
ROS Kinetic Kame |
Ubuntu 16.04 (Xenial) / Ubuntu 15.10 (Wily) |
| 2015.3 |
ROS Jade Turtle |
Ubuntu 15.04 (Wily) / Ubuntu LTS 14.04 (Trusty) |
| 2014.7 |
ROS Indigo Igloo |
Ubuntu 14.04 (Trusty) |
| 2013.9 |
ROS Hydro Medusa |
Ubuntu 12.04 LTS (Precise) |
| 2012.12 |
ROS Groovy Galapagos |
Ubuntu 12.04 (Precise)? |
| ?... | ... | ?... |
所以大兄弟,看到了吧,如果系統版本和ROS版本紕謬應,那是萬萬裝不上滴...博主此處已嫩牛滿面...
1.2 博主的配置
據博主的不完全統計(壓根就沒統計)的數據顯示,現在學ROS的兄弟們普遍安裝的是 Indigo 和 Hydro 版本, 但是現在已經時2016年啦,新的一年就要有新氣象,所以,博主就能別人所不克不及(呵呵),安裝了Kinetic.
具體設置裝備擺設如下:
華碩筆記本 + Windows 10 + Ubuntu 16.04 雙系統
- Ubuntu 硬盤大小: 100G
- 內存: 8G
- 顯卡: 也不是用來打dota, 所以隨便啦啦啦~\(≧▽≦)/~啦啦啦
Ros版本:ROS Kinetic Kame
博主分別用過 Indigo 和 Kinetic,其實在使用過程中差距并不大,除了極少數第三方庫,只支持 Indigo版本,究竟 Kinetic 剛剛發布,存在一些第三方庫還沒有及時跟進啦...
2 開端安裝
既然選定好版本,我們就開端安裝啦!
前提還是大兄弟已經本身安裝好了 Ubuntu 16.04 哦!如果是 Ubuntu 14.04,只需要把下面所有出現 *-kinetic-* 的地方換成 *-indigo-* 就好了.
2.1 軟件中心設置裝備擺設
首先打開軟件和更新對話框,具體可以在 Ubuntu 最左上角的搜索按鈕中搜索.
打開后依照下圖進行配置(確保你的"restricted", "universe," 和 "multiverse."前是打上勾的):
?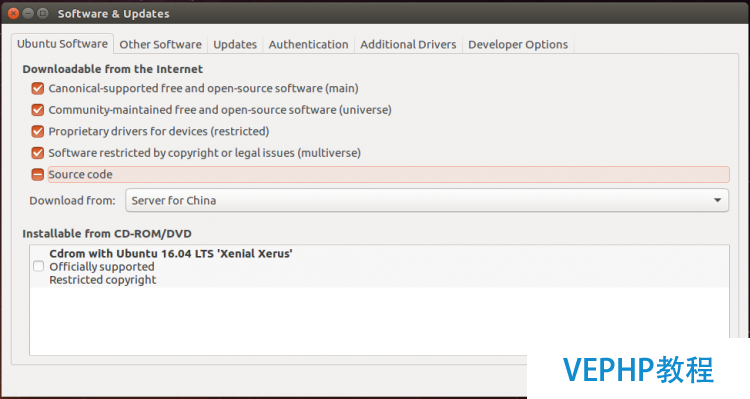
配置完成后就可以封閉該窗口了.
2.2 添加源
打開一個節制臺(Ctrl + Alt + T), 輸入如下指令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
設置秘鑰:
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
2.3 安裝 ROS
起首確保系統軟件處于最新版
$ sudo apt-get update
然后我們就可以安裝 ROS 啦,但是問題又出現了,ROS kinetic 也有很多版本,好比工業版,基礎版,高級版,豪華版,至尊豪華...
既然我們想要學習ROS,那就安裝至尊豪華全功效版吧,指令如下:
$ sudo apt-get install ros-kinetic-desktop-full
好,打完指令,就可以整瓶啤酒,擼個烤串,看看電視消遣消遣,坐等ROS安裝完成.
如果年夜兄弟家的網夠快的話,沒準分分鐘就完事兒了...
...3...
...2...
...1...
倒數三個數,好,現在就當大兄弟安裝完了,并且一切順利,沒有小蟲子(BUG)粗現...
安裝完成后,可以用下面的敕令來查看可使用的包:
$ apt-cache search ros-kinetic
到現在,雖然是安裝完了,但是還不克不及用ROS哦,大兄弟別著急,心急吃不到豆腐...哦,是吃不到熱豆腐...
2.4 初始化ROS
首先呢,必要先初始化 rosdep,嗯?這是啥?這不就是那個啥嘛,對吧,哈哈哈...⊙﹏⊙b汗
詳細如下:
$ sudo rosdep init $ rosdep update
然后初始化情況變量:
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc $ source ~/.bashrc
上面兩句異常異常異常重要,很多小伙伴在日常的開發過程中,有的找不到 Package, 找不到node, 很多情況下都是沒有添加source, 這里展開說就有點跑偏了,如果小伙伴們遇到問題,可以在留言中提出來...
最后呢,對,這是最后的最后了,安裝一個非經常用的插件:
$ sudo apt-get install python-rosinstall
好,到這里,所有安裝就都完事啦..哈哈哈..為了保險,重啟一下,測試測試我們的ROS吧....
對了,這里要提醒一下,ros中很多的第三方插件的安裝格局是:
$ sudo apt-get install ros-kinetic-... 例如: $ sudo apt-get install ros-kinetic-turtlebot*
3 測試ROS
安裝完了好歹要測試一下吧,否則怎么對的起那瓶啤酒啊...大兄弟,你還清醒嗎...
首先,啟動ROS情況
$ roscore
看看顯示 started core service [/rosout]? 了沒有?如果沒問題,恭喜大兄弟,你勝利了.
什么?出問題了?那好吧,估量是啤酒喝多了,再從頭來一遍吧,這次就別喝了...
這里鏈接一下我總結的ROS指令字典,年夜兄弟今后想查什么指令,直接看這個就好了
本文永遠更新鏈接地址:
歡迎參與《LINUX教程:超詳細 ROS安裝教程》討論,分享您的想法,維易PHP學院為您提供專業教程。
轉載請注明本頁網址:
http://www.snjht.com/jiaocheng/9304.html
同類教程排行
- LINUX入門:CentOS 7卡在開機
- LINUX實戰:Ubuntu下muduo
- LINUX教程:Ubuntu 16.04
- LINUX教程:GitBook 使用入門
- LINUX實操:Ubuntu 16.04
- LINUX教學:Shell、Xterm、
- LINUX教程:Linux下開源的DDR
- LINUX實戰:TensorFlowSh
- LINUX教學:Debian 9 'St
- LINUX實戰:Ubuntu下使用Vis
- LINUX教學:Linux 下 Free
- LINUX教學:openslide-py
- LINUX實操:Kali Linux安裝
- LINUX教學:通過PuTTY進行端口映
- LINUX教程:Ubuntu 16.04
