工業機器人編程教程-機器人編程運動
《工業機器人編程教程-機器人編程運動》要點:
本文介紹了工業機器人編程教程-機器人編程運動,希望對您有用。如果有疑問,可以聯系我們。
1、機器人的運動類型
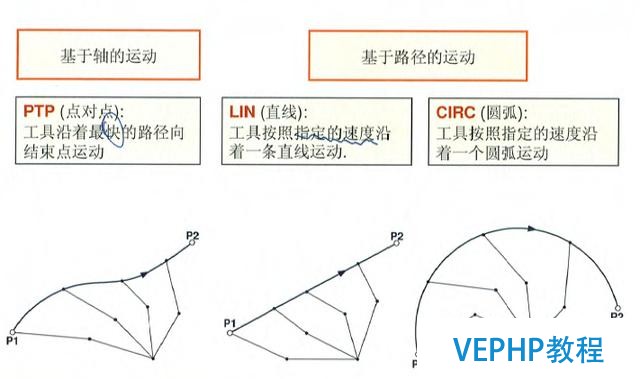
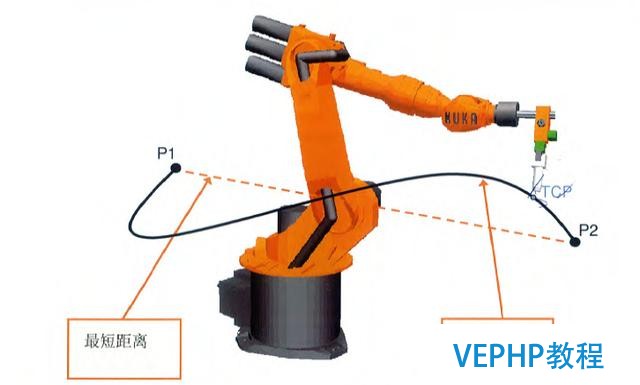
2、PTP運動
(1)PTP運動簡要介紹
PTP運動示意圖
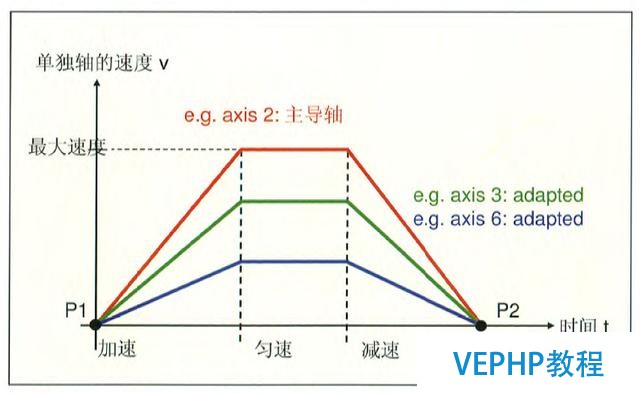
同步運動PTP
在一個PTP運動中,介入運動的軸中運動距離組長的被稱之為主軸,在運行指令中它的速度無法被精確定義.
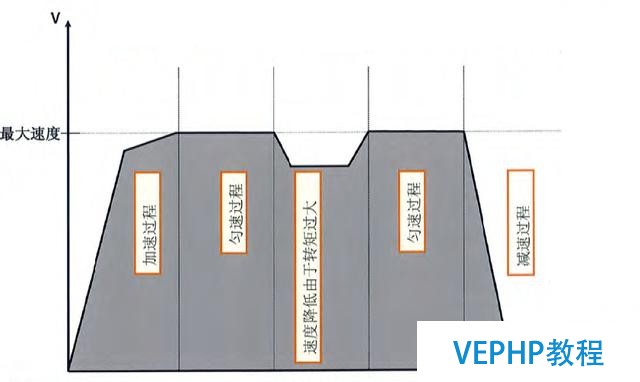
PTP高速運動示意圖
在以下這個V-T圖中,顯示高速模式下機器人的默認運動設定,在一個運 動中的機器人的扭矩控制始終會被優化,而且它的速度始終防止扭矩超差.
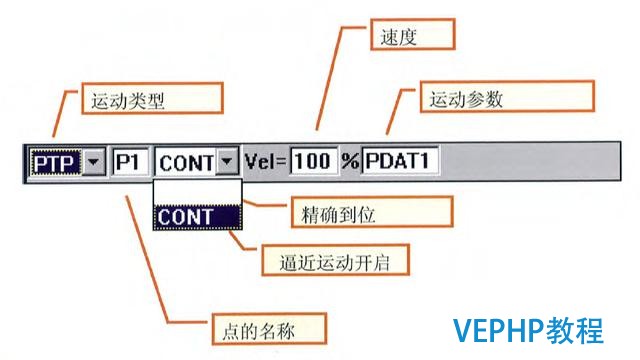
(2)編纂PTP運動指令
編纂運動指令一
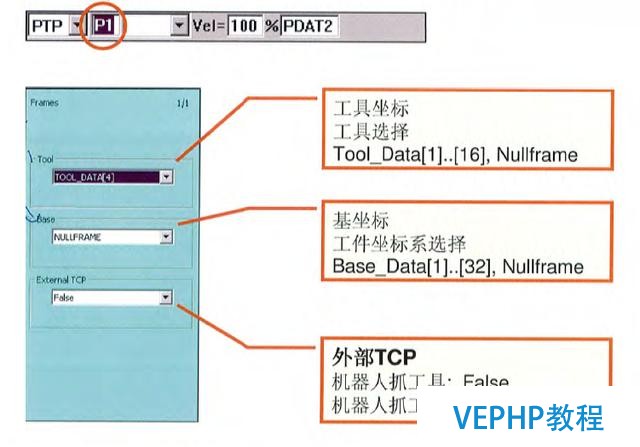
編纂運動指令二
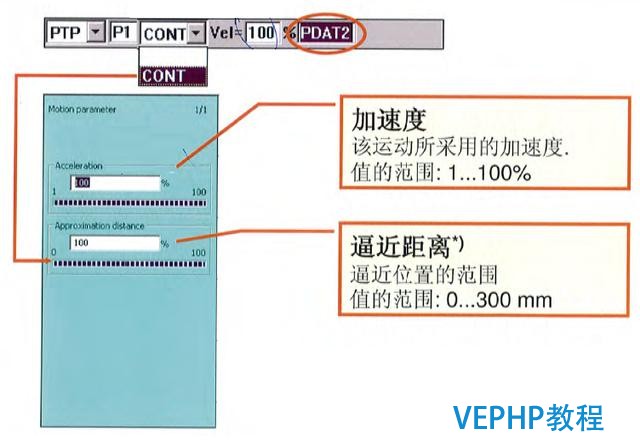
編纂運動指令三
只有當選擇切近親近運動(CONT)后,該參數“Approximation distance”才會顯示.
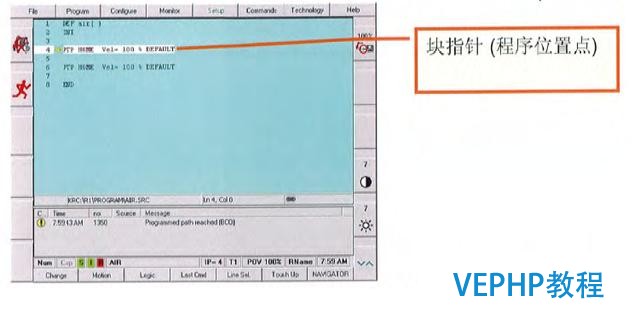
(3)BCOrun
第一部門
為了確保機器人處于程序設定的目標路徑上,必要執行BCO功能,這個功能會在一個低速狀態下執行,機器人會移動到相應塊指針所對應的運動指令點.
第二部門
只有當選擇切近親近運動(CONT)后,該參數“Approximation distance”才會顯示.
以下情況會執行BCO功能:
a、法式復位后通過BCO功能回到HOME點.
b、移念頭器人到塊指針選擇運動點.
c、外部自動模式錢選擇“CELL”法式.
d、選擇新法式.
e、指令修改后.
f、編程模式手動移動了機器人.
注意:
由于HOME位置是系統設定的初始位置,通常會保舉用戶將它作為程序的第
一以及最后一個運動指令,
第三部門
BCO功能總是直接從當前點向目標點運動,因此非常重要的一點是必要確保 此路徑上沒有障礙物,以防損壞工件、工具或者機器人.
機器人聯系運行方式:
1、選擇法式后,一直按下啟動鍵.
2、機器人自動低速運行.
3、機器人到達目標后,再按下啟動鍵法式繼續運行
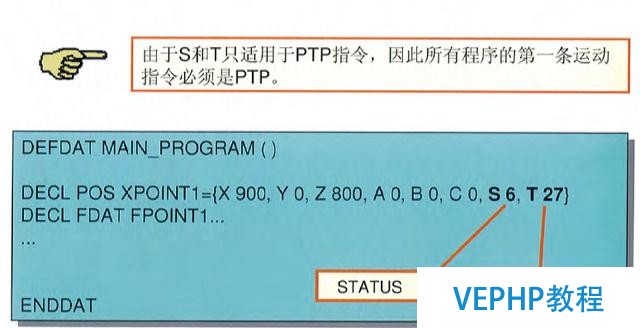
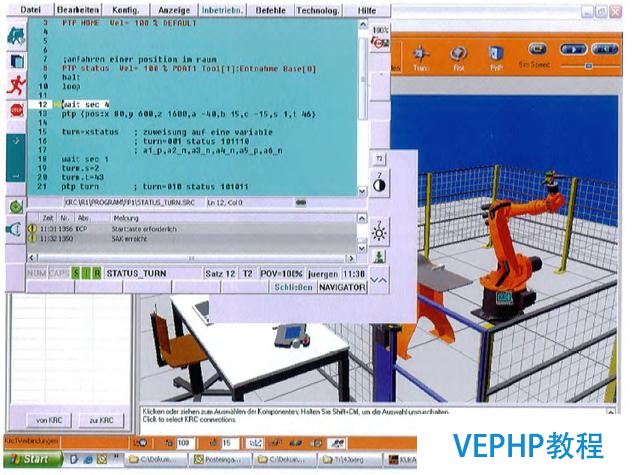
(4)姿態參數
姿態參數一
當機器人可以通過不同的姿態到達一個空間點時,參數S和T可以贊助機器人確定一個精確的唯一的姿態.
姿態參數二
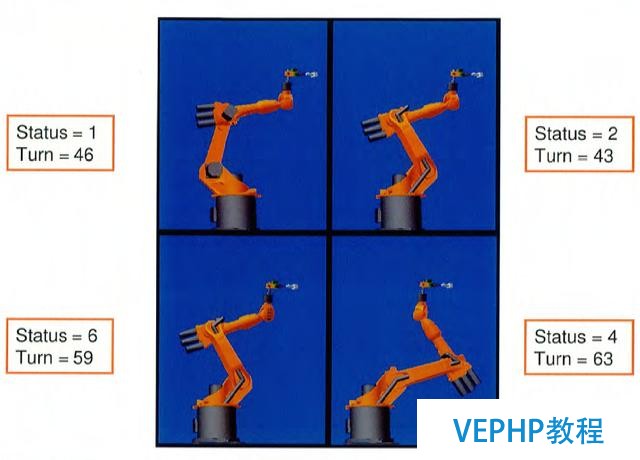
姿態參數三
3、LIN運動
(1)LIN運動簡介
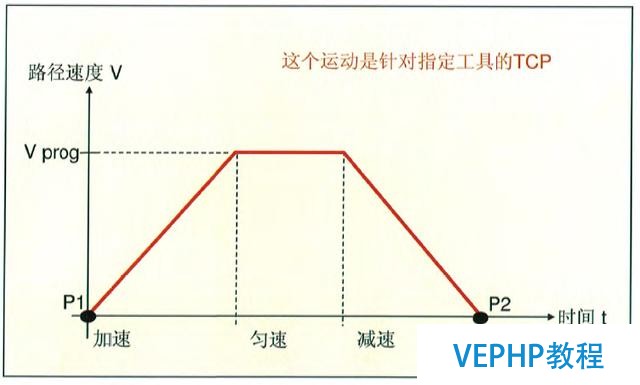
TCP沿著一條直線運動
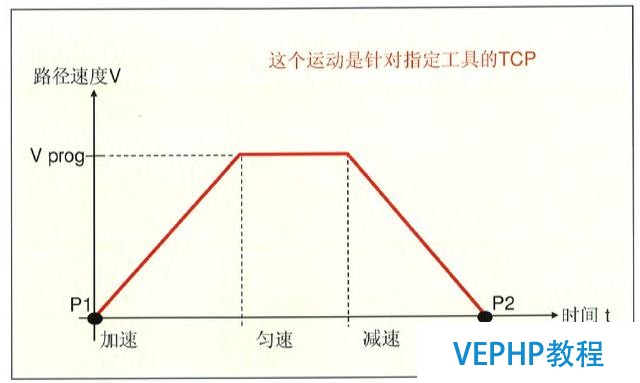
速度圖像
(2)編纂LIN指令
編纂指令一
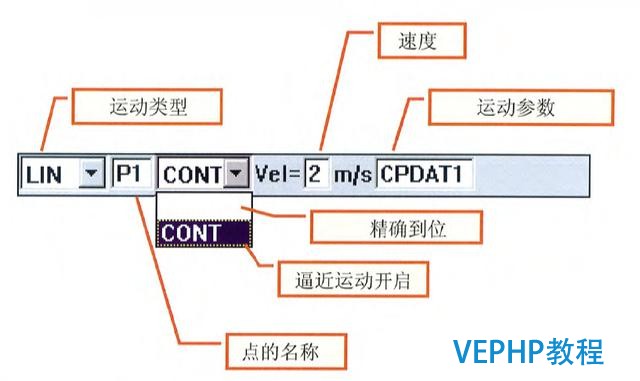
編纂指令二
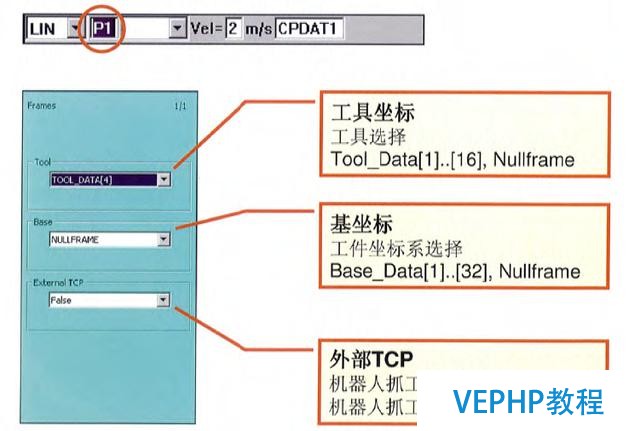
編纂指令三
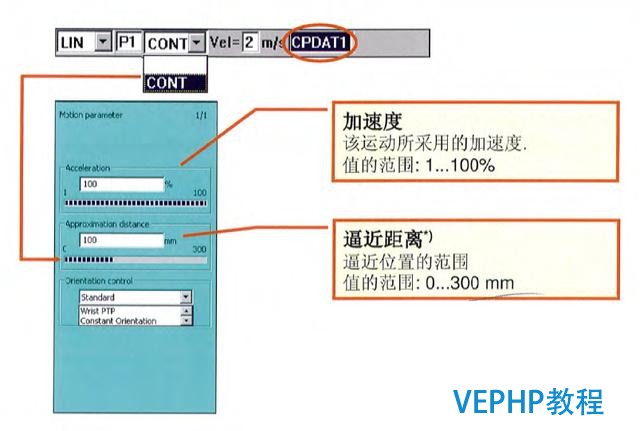
只有當選擇切近親近運動(CONT)后,該參數“Approximation distance”才會顯示.
編纂指令四
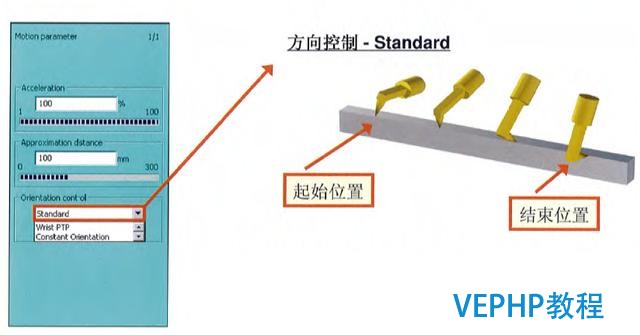
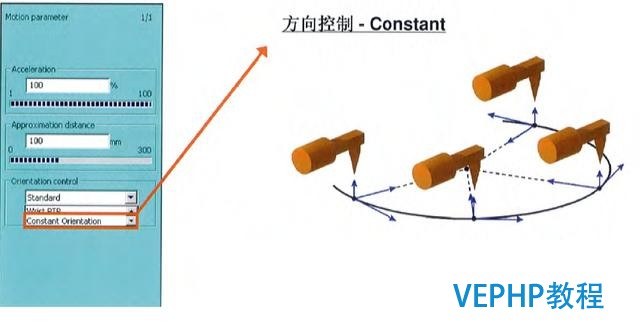
在這個路徑運動過程中,工具的方向會從起始點到結束點持續變化,這個動作的完成取決于工具的姿態.
編纂指令五
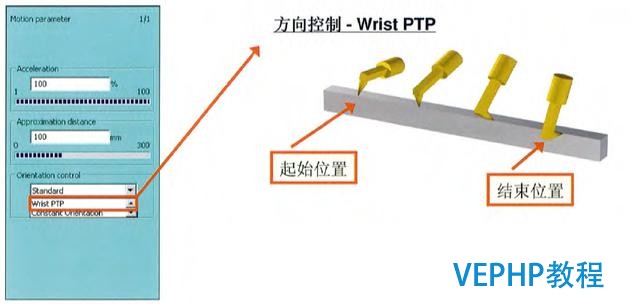
在這個路徑運動過程中,工具的方向會從起始點到結束點連續變化,這種方式通過腕部軸的變化把執行運動拆分成若干個PTP運動來執行,這種方式可以避免死角情況產生.
編纂指令六
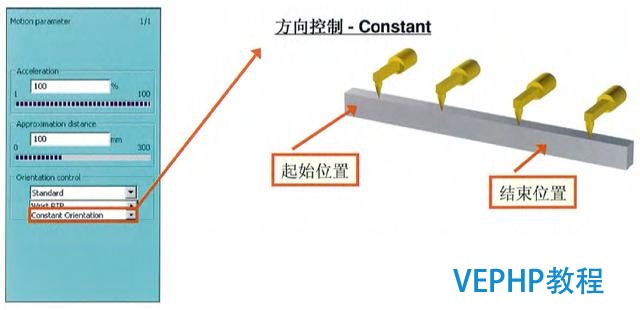
在這個連續動作中,工具方向始終堅持不變,保留起始點的工具姿態忽略結束點的工具姿態.
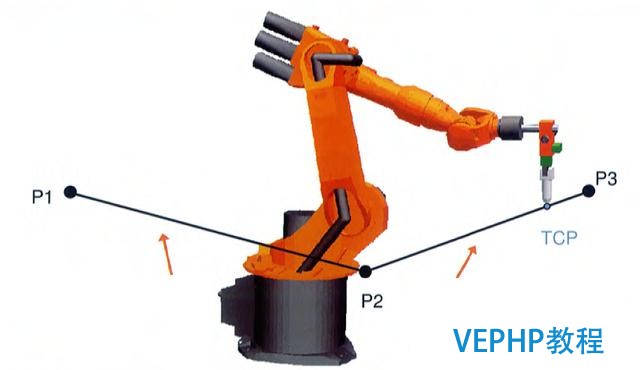
4、CIRC運動
(1)CIRC運動簡介
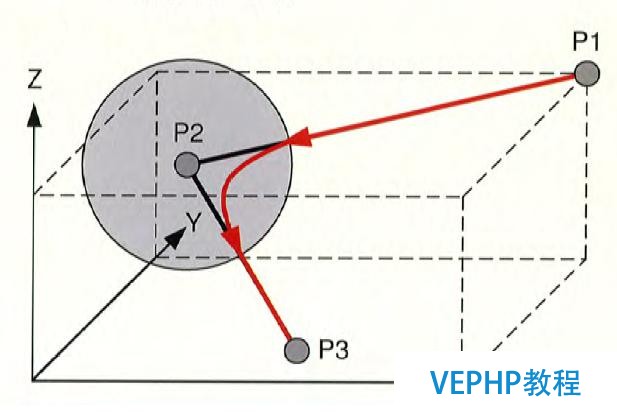
TCP沿著圓弧向結束點運動

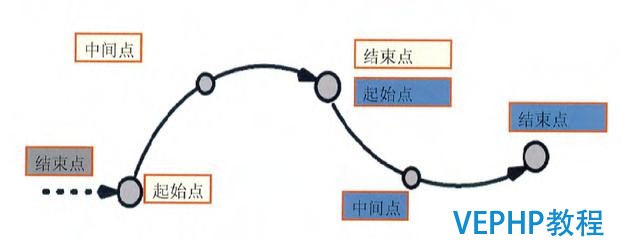
這里TCP或者是工件的參考點,會沿著圓弧向結束點運動,這條路徑由起始點,中間點,結束點確定的,運動結束點會是下一個運動的起始點;當一個點作為圓弧中間點的時候,它的工具姿態就會被忽略
CIRC運動速度圖形
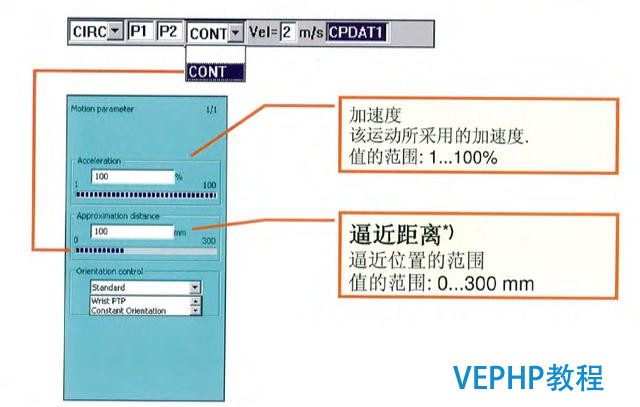
(2)編纂CIRC運動指令
CIRC運動指令一

CIRC運動指令二

CIRC運動指令三
只有當選擇切近親近運動(CONT)后,該參數“Approximation distance”才會 顯示.
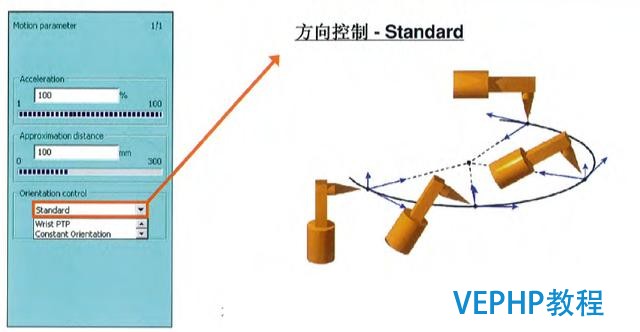
CIRC運動指令四
在這個路徑運動過程中,工具的方向會熊起始點到結束點持續變化,這個動作的完成取決于工具的姿態.
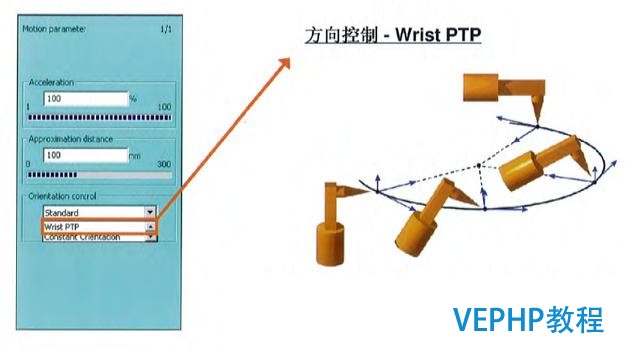
CIRC運動指令五
在這個路徑運動過程中,工具的方向會從起始點到結束點連續變化,這 種方式通過腕部軸的變化把直線運動拆分成若干個PTP運動來執行,這種方式可以避免死角情況的產生.
CIRC運動指令六
在這個連續運動中,工具方向始終堅持不變,保留起始點的工具姿態,忽略結束點工具姿態.
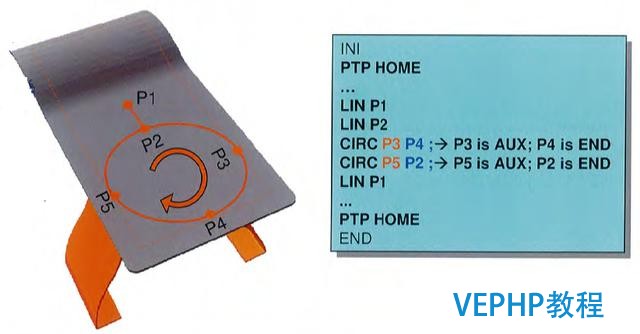
(3)360°的整圓
一個完整的圓弧必需用兩個語句來完成.
5、切近親近運動
(1)切近親近運動簡介
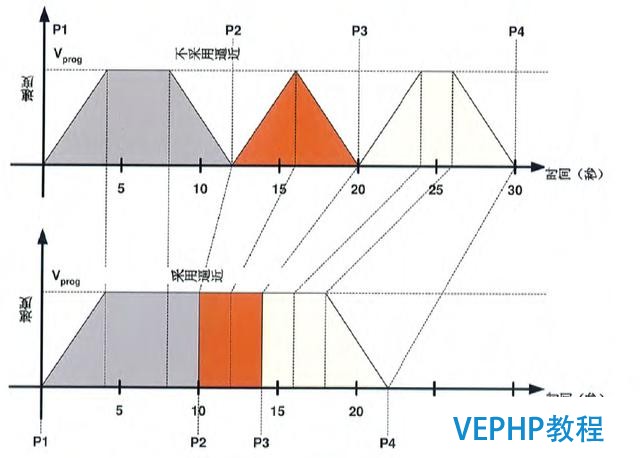
在切近親近的過程中,機器人不會精確的到達程序的每一個點,因此沒有停頓,這樣可以減少損耗和縮短生產節拍.
切近親近運動所節省的節拍時間
(2)PTP切近親近運動
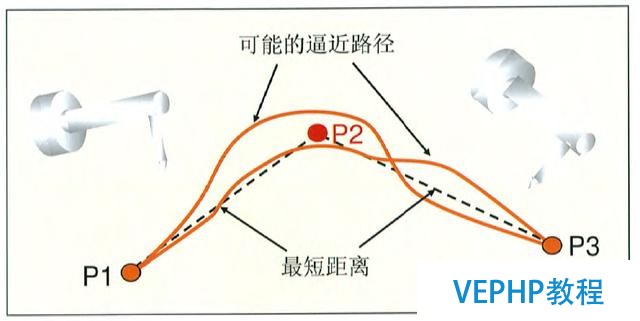
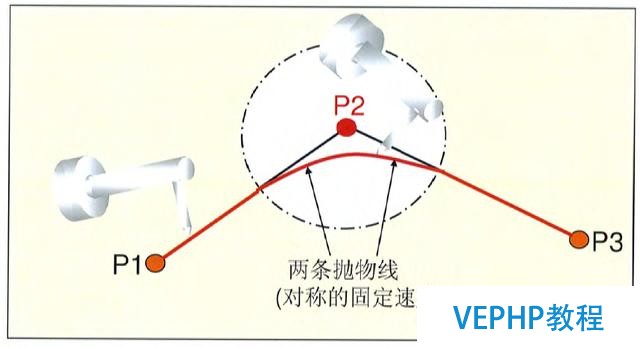
PTP切近親近運動示意圖,P2是切近親近點.
(3)LIN切近親近運動
P2是切近親近點.
(4)CIRC切近親近運動
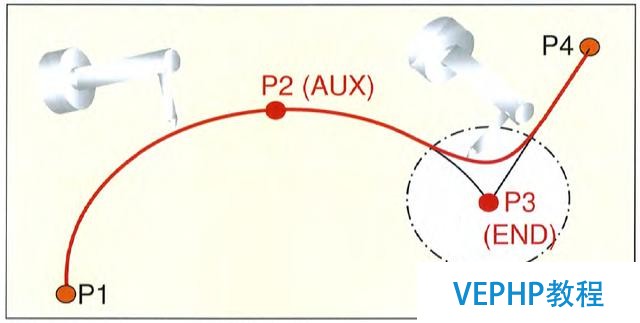
P3是切近親近點
(5)計算機前置斷定功能
前置斷定功能一
a、什么是前置斷定?
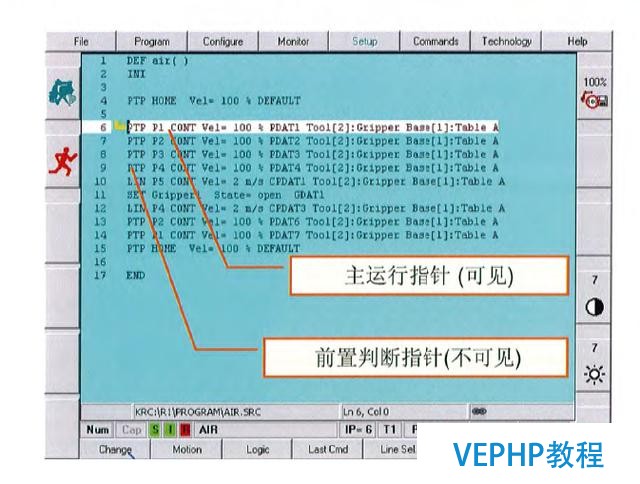
當程序運行時,在用戶圖形界面中可以看到主運行指針(白色運行條) 一直可以只是程序當前執行的行,另一個弗成見的前置判斷指針會刷新到主運行指針的后上運動指令的地方(默認設置)
b、前置斷定的功能是什么?
為了能計算路徑,例如切近親近運動,就必須用到前置判斷指針來預先規劃路徑數據,不僅是運動指令會被執行,而且運算指令和外圍控制指令也同樣會被執行.
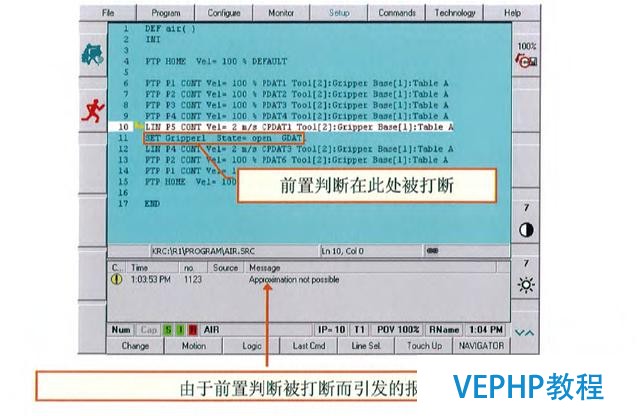
c、影響前置云的外圍設備(例如輸入輸出錯誤指令)結構和數據會觸發前置判斷停止,如果前置被打斷,切近親近運動將不會被執行.
前置斷定功能二
前置斷定功能三
維易PHP學堂逐步分享更多《工業機器人編程教程-機器人編程運動》相關教程。歡迎交流
轉載請注明本頁網址:
http://www.snjht.com/jiaocheng/9279.html
